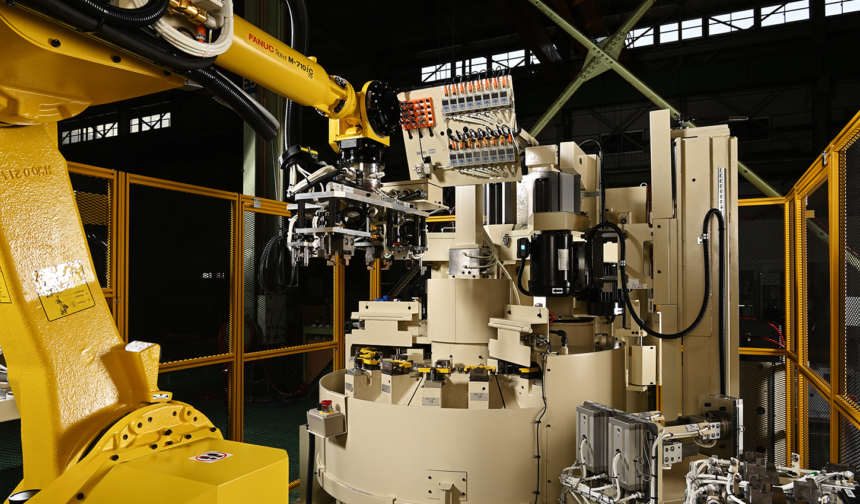
ロータリーフライスで通常行っている人間による脱着を、ロボットによる脱着に変更しました。
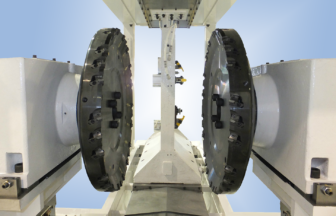
ロータリーフライスは回転テーブルのため回転中のロボットによる脱着は不可能と思われていますが、円弧トラッキングを行う事でテーブル回転中の脱着も可能となります。
また、テーブル回転速度が一定のため非常に安定した生産数を確保することができます。
Before変更前

- 通常ロータリーフライス盤のワーク着脱を行う場合、作業者が休みなく行います。
ワークが重い、持ちにくいなどの理由で着脱に時間がかかるため、テーブルを早く回すことができません。
そのためテーブル上の治具数を増やして生産数をカバーする必要が出てきます。
After変更後

- ワーク着脱をロボットで行うことにより、作業者スキルによる生産数の違いがなくなります。
また、重いワークでもテーブル回転速度を上げることができるため、治具数も減らすことができます。
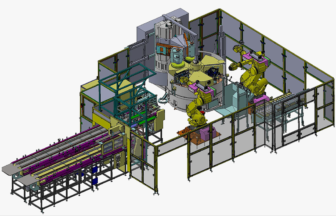
ロボットを2台使えばこれまで設備が2台必要だった裏表の加工が設備1台で可能になります。
掲載情報について
掲載の製品画像はあくまで一例です。既存設備のバージョンアップをご検討の際は、ご利用のロボットのメーカー・仕様などに制限はありません。
当社の製品はすべて、お客さまの製造ラインのレイアウト・キャパシティー・製品概要・人員配置など詳細をヒアリングの上、ご要望を踏まえてご提案しております。